\( \DeclareMathOperator{\abs}{abs} \newcommand{\ensuremath}[1]{\mbox{$#1$}} \)
Roulette Curves with GNU/Linux
1) A Very Complex Roulette: Ellipse Rolling on Limacon
| (%i2) | kill ( all ) $ load ( draw ) $ load ( newton1 ) $ |
| (%i3) |
set_draw_defaults
(
xrange
=
[
−
2
,
6
]
,
yrange
=
[
−
3
,
3
]
,
proportional_axes
=
xy
,
grid
=
true
,
nticks
=
200
,
background_color
=
light_yellow
,
line_type = solid , line_width = 1 , point_type = 0 , point_size = 1 , points_joined = true , xaxis = false , yaxis = false , xlabel = "Real Axis" , ylabel = "Imaginary Axis" ) $ |
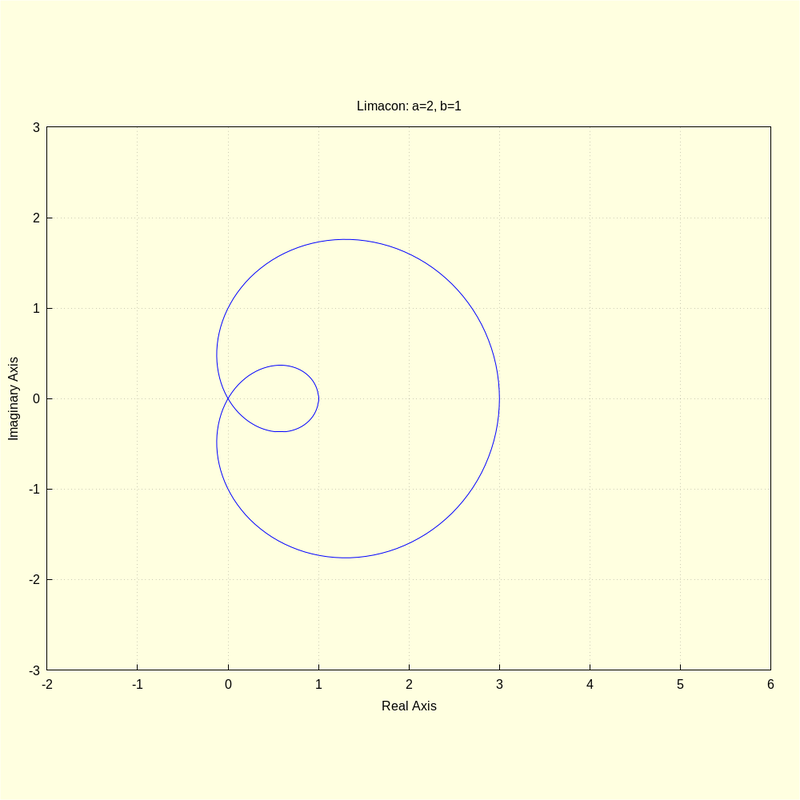
1.1 Define the Fixed Curve as a General Limacon
| (%i4) | fx ( t , a , b ) : = ( b + a · cos ( t ) ) · cos ( t ) + %i · ( b + a · cos ( t ) ) · sin ( t ) ; |
\[\operatorname{ }\operatorname{fx}\left( t\operatorname{,}a\operatorname{,}b\right) \operatorname{:=}\left( b+a \cos{(t)}\right) \cos{(t)}+i \left( b+a \cos{(t)}\right) \sin{(t)}\]
| (%i8) |
a
:
2
$
b
:
1
$
wxdraw2d ( nticks = 200 , parametric ( realpart ( fx ( t , a , b ) ) , imagpart ( fx ( t , a , b ) ) , t , 0 , 2 · %pi ) ) $ kill ( a , b ) $ |
\[\operatorname{ }\]
| (%i9) | define ( dfx ( t , a , b ) , trigsimp ( diff ( fx ( t , a , b ) , t ) ) ) ; |
\[\operatorname{ }\operatorname{dfx}\left( t\operatorname{,}a\operatorname{,}b\right) \operatorname{:=}\left( -2 a \cos{(t)}-b\right) \sin{(t)}+2 i a {{\cos{(t)}}^{2}}+i b \cos{(t)}-i a\]
| (%i10) | integrate ( trigsimp ( cabs ( dfx ( t , a , b ) ) ) , t ) ; |
\[\operatorname{ }\int {\left. \sqrt{2 a b \cos{(t)}+{{b}^{2}}+{{a}^{2}}}dt\right.}\]
2 * (a + b) * elliptic_e(t/2, (4 a b)/(a + b)^2) + constant
| (%i11) | sfx ( t , a , b ) : = 2 · ( a + b ) · elliptic_e ( t / 2 , ( 4 · a · b ) / ( a + b ) ^ 2 ) ; |
\[\operatorname{ }\operatorname{sfx}\left( t\operatorname{,}a\operatorname{,}b\right) \operatorname{:=}2 \left( a+b\right) \operatorname{elliptic\_ e}\left( \frac{t}{2}\operatorname{,}\frac{4 a b}{{{\left( a+b\right) }^{2}}}\right) \]
1.2 Define the Rolling Curve as a General Ellipse
The ellipse rolls counterclockwise, starting at u - pi.
| (%i13) |
define
(
ro
(
u
,
ar
,
br
,
a
,
b
)
,
trigsimp
(
ar
·
cos
(
−
u
−
%pi
)
+
%i
·
br
·
sin
(
−
u
−
%pi
)
+
(
a
+
b
)
+
ar
)
)
;
define ( dro ( u , ar , br ) , diff ( ro ( u , ar , br , a , b ) , u ) ) ; |
\[\operatorname{ }\operatorname{ro}\left( u\operatorname{,}\ensuremath{\mathrm{ar}}\operatorname{,}\ensuremath{\mathrm{br}}\operatorname{,}a\operatorname{,}b\right) \operatorname{:=}i \ensuremath{\mathrm{br}} \sin{(u)}-\ensuremath{\mathrm{ar}} \cos{(u)}+b+\ensuremath{\mathrm{ar}}+a\]
\[\operatorname{ }\operatorname{dro}\left( u\operatorname{,}\ensuremath{\mathrm{ar}}\operatorname{,}\ensuremath{\mathrm{br}}\right) \operatorname{:=}\ensuremath{\mathrm{ar}} \sin{(u)}+i \ensuremath{\mathrm{br}} \cos{(u)}\]
| (%i14) | ' integrate ( cabs ( dro ( u , ar , br ) ) , u ) ; |
\[\operatorname{ }\int {\left. \sqrt{{{\ensuremath{\mathrm{ar}}}^{2}} {{\sin{(u)}}^{2}}+{{\ensuremath{\mathrm{br}}}^{2}} {{\cos{(u)}}^{2}}}du\right.}\]
sro(u,ar,br):= br*elliptic_e(u, 1-ar^2/br^2)
| (%i15) | sro ( u , ar , br ) : = br · elliptic_e ( u , 1 − ar ^ 2 / br ^ 2 ) ; |
\[\operatorname{ }\operatorname{sro}\left( u\operatorname{,}\ensuremath{\mathrm{ar}}\operatorname{,}\ensuremath{\mathrm{br}}\right) \operatorname{:=}\ensuremath{\mathrm{br}} \operatorname{elliptic\_ e}\left( u\operatorname{,}1-\frac{{{\ensuremath{\mathrm{ar}}}^{2}}}{{{\ensuremath{\mathrm{br}}}^{2}}}\right) \]
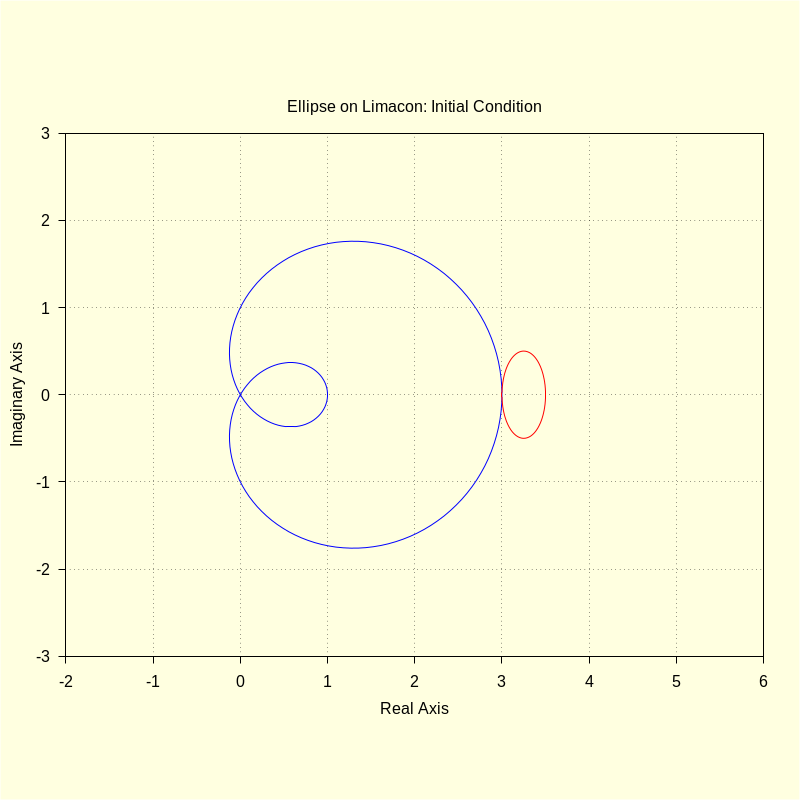
1.3 Plot Initial Condition
| (%i21) |
a
:
2
$
b
:
1
$
ar : 1 / 4 $ br : 1 / 2 $ wxdraw2d ( color = blue , parametric ( realpart ( fx ( t , a , b ) ) , imagpart ( fx ( t , a , b ) ) , t , 0 , 2 · %pi ) , color = red , parametric ( realpart ( ro ( u , ar , br , a , b ) ) , imagpart ( ro ( u , ar , br , a , b ) ) , u , 0 , 2 · %pi ) , title = "Ellipse on Limacon: Initial Condition" ) $ kill ( a , b , ar , br ) $ |
\[\operatorname{ }\]
1.4 Test the Derived Equations for Correctness
| (%i22) | kill ( t , u , ar , br , a , b ) $ |
| (%i28) |
t
:
100
.
0
;
a : 2 $ b : 1 $ ar : 1 / 4 $ br : 1 / 2 $ ut : newton ( sro ( u , ar , br ) − sfx ( t , a , b ) , u , t , 1e-10 ) ; |
\[\operatorname{(t) }100.0\]
\[\operatorname{(ut) }550.4730334731746\]
| (%i30) |
sfx
(
t
,
a
,
b
)
;
sro ( ut , ar , br ) ; |
\[\operatorname{ }212.2619508547393\]
\[\operatorname{ }212.2619508547393\]
| (%i32) |
kill
(
t
,
u
,
a
,
b
,
ar
,
br
)
$
depends ( u , t ) $ |
| (%i33) | define ( dudt ( t , u , a , b , ar , br ) , radcan ( trigsimp ( rhs ( solve ( factor ( cabs ( diff ( ro ( u , ar , br , a , b ) , t ) ) ) = cabs ( dfx ( t , a , b ) ) , diff ( u , t ) ) [ 1 ] ) ) ) ) ; |
\[\operatorname{ }\operatorname{dudt}\left( t\operatorname{,}u\operatorname{,}a\operatorname{,}b\operatorname{,}\ensuremath{\mathrm{ar}}\operatorname{,}\ensuremath{\mathrm{br}}\right) \operatorname{:=}\frac{\sqrt{2 a b \cos{(t)}+{{b}^{2}}+{{a}^{2}}}}{\sqrt{{{\ensuremath{\mathrm{ar}}}^{2}} {{\sin{(u)}}^{2}}+{{\ensuremath{\mathrm{br}}}^{2}} {{\cos{(u)}}^{2}}}}\]
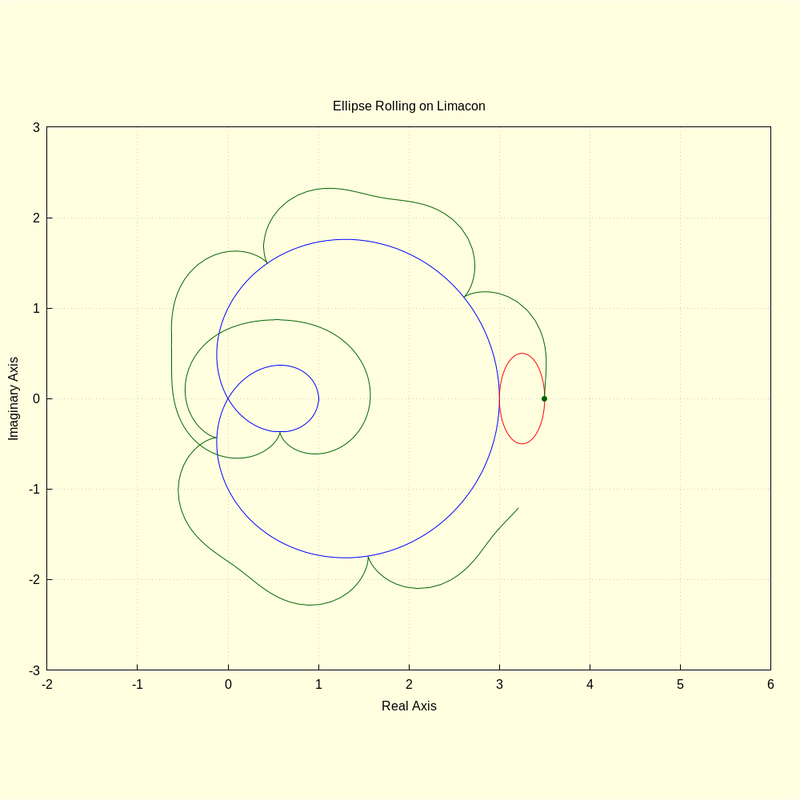
1.5 Plot the Roulette
| (%i35) |
kill
(
t
,
u
,
a
,
b
,
ar
,
br
,
ut
,
M
)
$
M : zeromatrix ( 600 , 2 ) $ |
| (%i43) |
a
:
2
$
b
:
1
$
ar
:
1
/
4
$
br
:
1
/
2
$
/* p:(a+b)+ar+sqrt(ar^2-br^2)$ */ p : ( a + b ) + 2 · ar $ t : 0 . 0 $ tinc : 0 . 01 $ for i : 1 thru 600 step 1 do ( u : newton ( sro ( ut , ar , br ) − sfx ( t , a , b ) , ut , t , 1e-10 ) , roul : fx ( t , a , b ) − ( ro ( u , ar , br , a , b ) − p ) · dfx ( t , a , b ) / ( dro ( u , ar , br ) · dudt ( t , u , a , b , ar , br ) ) , M [ i , 1 ] : float ( realpart ( roul ) ) , M [ i , 2 ] : float ( imagpart ( roul ) ) , t : t + tinc ) $ |
| (%i45) |
kill
(
u
,
t
)
$
wxdraw2d ( color = blue , parametric ( realpart ( fx ( t , a , b ) ) , imagpart ( fx ( t , a , b ) ) , t , 0 , 2 · %pi ) , color = red , parametric ( realpart ( ro ( u , ar , br , a , b ) ) , imagpart ( ro ( u , ar , br , a , b ) ) , u , 0 , 2 · %pi ) , color = darkgreen , point_size = 1 , point_type = 7 , points ( [ [ realpart ( p ) , imagpart ( p ) ] ] ) , point_type = 0 , points ( M ) ) $ |
\[\operatorname{ }\]
2) Conclusion
Created with
wxMaxima.
Modified and embedded by L.A.P.
As usual, we begin with an initialization of Maxima/wxMaxima: